
0 引言
无砟轨道具有整体性强,结构稳定等特点,是高速铁路主要的轨道结构形式。无砟轨道建成后很难再进行较大的调整,为了保证无砟轨道具有准确的几何线形,轨道平顺性调整成了高速铁路轨道施工的关键。目前关于高铁产生断高后如何调整线路纵坡的研究成果较少,尚没有成熟的处理方式。本文针对兰新客运专线CRTSⅠ型双块式无砟轨道施工过程产生的断高问题进行探讨,以兰新客运专线兰州枢纽段轨道板铺设及长轨精调为实践依据,对施工问题进行分析,提出了问题的最终解决方案。
1 断高产生的原因
高平顺性的轨道施工技术是高速铁路的关键技术之一,轨道的高平顺性也是列车高速安全行驶,提高旅客乘坐舒适度的必要条件。高速铁路建设运营受线下工程地质状况的影响,尤其是区域地面沉降变形,直接影响轨道平顺性。
兰新客运专线两相邻施工标段(Ⅰ标段、Ⅱ标段),由于施工期间水准点下沉,实测单位的不同,导致两标段交界处(DK18+236.35)CPⅢ高程不能较好闭合,存在18mm差值,为保证高铁线路平顺性满足《高速铁路轨道工程施工质量验收标准》(TB10754—2018)的要求。首先采集已铺设的轨道板测量数据,由于数据较多不便在文中列出。通过对现场测量的数据分析得出如下结论:Ⅰ标段和Ⅱ标段两标段交界处DK18+236.35高程,按照Ⅰ标段CPⅢ高程,其比设计高程高9mm(相对于Ⅱ标段CPⅢ高程数据,其比设计高程低9mm),通过分析施工测量断高调整设计坡度,将两段各向前后按480m顺接至设计标高。此时,使得本段长钢轨高程最大偏差值(交界处)比设计标高低9mm,同时现场调整量最大值为垫高9mm,考虑到个别施工偏差向下最大15mm,最大垫高值即为24mm;考虑到施工偏差向上值最大13mm,最大降低值4mm。可满足规范要求,同时确保现场具有可操作性。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
2 高速铁路CPⅢ控制网测量所需精度指标分析
高速铁路无砟轨道要求具有良好的平顺性,其中CPⅢ控制网测量、铺轨测量以及长轨精调测量是关键环节和关键技术。《高速铁路工程测量规范》(TB10601—2009)规定新建CPⅢ平面网相邻点位相对精度主要精度指标控制在±1mm,而相邻点的相对点位精度又取决于直接外业观测值精度、控制网网形以及起算数据精度,但主要还是取决于直接观测精度。CPⅢ外业直接观测精度通常需要通过一系列限差指标来控制,包括2C值、2C互差值、距离较差值、水平方向较差值等。
根据CPⅢ平面控制网精度要求,一般带有全自动马达驱动、自动照准功能、电子水平气泡(倾斜补偿功能)的高精度全站仪是高铁工程测量的主要测量仪器,其避免了各种人为因素的影响。具有此功能的全站仪现有LeicaT⁃CA2003、TS30、TM30等。研究得出:全站仪标称精度,一测回方向中误差±0.5″、测距中误差±(1mm+1ppm)型全站仪,自由测站测回数不应少于3个测回;一测回方向中误差±1″、测距中误差±(1mm+2ppm)型全站仪,自由测站测回数不应少于4个测回。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
CPⅢ平面控制网具有以下特点:以沿线路方向60m布设1对控制点,每公里大约布设32对控制点,严格对称、网形规则;它是边角控制网,采用自由设站法测量,多余观测多,网纵向精度高,横向精度略差。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
一般测站距最远的CPⅢ点距离约为150m,选最低标称精度的全站仪(1mm+2ppm),距离测量一次中误差:m=±(1+2×0.15)=±1.30mm;一测回距离=(上半测回距离+下半测回距离)/2,根据误差传播定律,测量一测回测距误差:\(m=\frac{\pm 1.3}{\sqrt{2}}=\pm 0.92mm\);同理,两测回距离均值较差中误差:m较差\(=\pm \sqrt{2}\times 0.92=\pm1.30mm\),取2倍中误差为允许误差,则两测回距离测量均值较差的允许值应小±2.6mm。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
2C=L-(R±180°),其中,L、R—分别是盘左和盘右观测的水平方向值。2C互差在相关测量规范中指的是不同测回同一方向2C值较差,而在CPⅢ平面控制网测量中,各方向竖直角较差大多都小于3°,所以此时的2C互差指的是同一测回内各个方向的2C互差。为了提高测量效率,可以将规范中规定的2C互差放大到15″,通过实验仿真计算,未见点位误差超限,验后单位权中误差和CPⅢ点间相对精度也都满足规范要求。

图1 高程控制网网形
进行CPⅢ高程控制网测量时,水准路线按照如图1中中空箭头的方向进行,即箭头表示方向为高程传递方向,因此相邻的两对(四个)CPⅢ控制点之间都能组成一个闭合的环路。
在外业测量时,由两个测站完成各闭合环的四个高差测量,按照奇数站按后前前后,偶数站按前后后前的顺序进行水准测量。进行高程测量时应使用具有易操作和高精度的水准仪及配套条码尺,以便观测人员使用,同时能保障测量数据时所需的精度。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
CPⅢ高程网精密水准测量的主要技术指标,应符合表1的规定。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
表1 精密水准测量的主要技术标准
| 附合路线长度观测次数/km | 水准仪最低型号 | 水准尺 | 观测次数 | |
| 与已知点联测 | 环线 | |||
| ≤3 | DS1 | 因瓦 | 往返 | 单程 |
表2 精密水准测量精度要求 (单位:mm)
| 每千米水准测量偶然中误差MΔ | 每千米水准测量全中误差Mw | 限差 | |||
| 检测已测段高差之差 | 往返测不符值 | 附合路线或环线闭合差 | 左右路线高差不符值 | ||
| ≤2.0 | ≤4.0 | \(12\sqrt{Ri}\) | \(8\sqrt{k}\) | \(8\sqrt{L}\) | \(4\sqrt{k}\) |
注:k为测段水准路线长度(km);L附合或环线的水准路线长度(km);Ri为检测测段长度(km);结点之间或结点与高级点之间,其路线的长度不应大于表中规定的0.7倍。
当MΔ和Mw符合规定,表明沿线路的水准测量精度是合格的,如不符要求,应对超限路线重测。
经检查,各项技术指标均合格的整网或分段的水准观测数据才可以进行内业的平差数据计算。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
每公里水准测量的偶然中误差:
$$M_\Delta =\sqrt{\frac{1}{4n}\left [ \frac{\Delta \Delta }{L}\right ]}$$󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
每公里水准测量的全中误差:
$$M_w =\sqrt{\frac{1}{N}\left [ \frac{WW}{L}\right ]}$$󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
CPⅢ高程网精密水准测量测站的主要技术规定,应符合下表3的规定。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
表3 CPⅢ高程网精密水准测量测站的主要技术标准
| 前后视距差/m | 视线高度/m | 两次读数之差/m | 两次读数所测高差之差/m |
| ≤ ±2 | ≥0.3 | ≤±0.5 | ≤ ±0.7 |
3 轨道静态调整
采用轨道精测小车对轨道进行逐根轨枕连续测量。测量前,全站仪设站精度应满足要求,并对仪器进行校核。区间轨道应连续分站测量,转站测量时,两次测量搭接长度不少于10根轨枕,每站测量长度不宜大于60m,小车与全站仪的最小距离不宜小于5m。
轨道精调是根据轨道精测数据对轨道进行的精确调整,使轨道精度达到规范标准,使轨道静态精度满足高速行车条件。轨道精度通常可分为相对精度和绝对精度。绝对精度是指轨道实测中线、高程与设计值的偏差,偏差越小精度越高。相对精度是指轨道各项几何尺寸(轨距、水平、轨向、高低)的偏差和变化率。相对精度控制应包括轨道几何尺寸控制和轨道线形控制(平顺性)两个方面。轨道平顺性不仅应包括轨向、高低的长波、短波偏差,还应包含轨距、水平、高低、轨向、变化率等。轨道精调是根据轨道精测数据分析轨道的平顺性状态,提出精确到每个轨枕位置的轨道调整量表,指导外业实施轨道调整的渐进过程,经过调整轨道的平顺性状态就会得到进一步改善,直到满足要求。轨道调整前,根据现场采集的轨道测量数据生成静态调整试算表以及轨道平面、高程偏差对比图,经分析外业测量数据的准确性和真实性,决定轨道静态调整的质量。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
安博格轨道测量系统已经将轨道平顺性条件输入到软件中,通过软件调整计算出每个轨枕处轨道调整量。一般首先调整绝对位置,绝对位置就是轨道设计中线和高程偏差调整。然后调整内部参数,通过轨道轨距、轨向、水平和高低等指标调整,提高平顺性,即轨道线性优化的过程。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
模拟调整应坚持“先整体、后局部”,“先轨向、后轨距;先高低、后水平”的调整原则。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
“先整体、后局部”:主要是针对长波不平顺区段,根据采集数据的整体趋势图生成的波形,大致标出期望的线路走向或起伏状态,再分析局部线形,以“削峰填谷”的方式细化调整方案,确定轨道调整量。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
轨向调整以高轨为基准轨,高低调整以低轨为基准轨。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
“先轨向、后轨距;先高低、后水平”:先调整基准轨轨向,非基准轨平面位置利用轨距及轨距变化率来控制;先调整基准轨高低,非基准轨的高程利用超高和超高变化率来控制。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
表4 轨道精调的作业标准及验收标准
| 项目 | 无砟轨道 | ||
| 允许偏差 | 推荐控制标准 | 检测方法 | |
| 轨距 | ±1mm | ±1mm | 相对于1435mm |
| 1/1500 | 1mm/4 个扣件 | 变化率 | |
| 轨向 | 2mm | 1mm | 弦长10m |
| 2mm/8a | 1mm/8a | 基线长48a | |
| 10mm/240a | 5mm/240a | 基线长480a | |
| 高低 | 2mm | 1mm | 弦长10m |
| 2mm/8a | 1mm/8a | 基线长48a | |
| 10mm/240a | 5mm/240a | 基线长480a | |
| 水平 | 1mm | 1mm | — |
| 扭曲(基长3m) | 2mm | 1mm | — |
| 曲线(20m 弦长,检测点间隔2.5m) | 缓和曲线正矢与设计正矢之差不大于0.5mm | ||
| 圆曲线正矢连续差不大于1mm,最大最小正矢差不大于2mm | |||
4 断高点处轨道调整
应用Amberg精测小车采集DK17+595.57—DK18+705.94段数据,使用全站仪自由设站后方交会的方法对CPⅢ的精度进行检查。测量8个CPⅢ控制点,其中采用Ⅰ标段施工单位的3对CPⅢ坐标和1对Ⅱ标段施工单位的CPⅢ坐标,设站精度远远超出了高铁精测精调的精度要求。精测小车站与站之间高程无法满足搭接2mm以内的要求,对高铁的精调和高铁的养护维修造成影响。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
为确保CPⅢ网的精度要求,测量采用由Ⅰ标段施工单位提供的CPⅢ高程为基准向Ⅱ标段联测的12对CPⅢ高程数据,全站仪设站精度方可满足要求,并对仪器进行校核。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
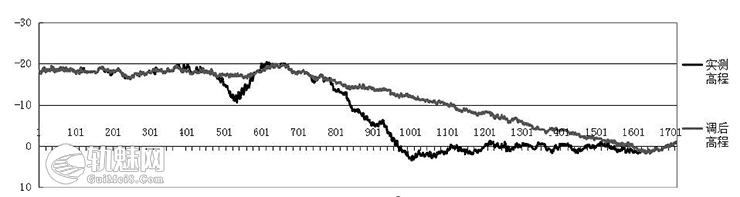
图2 左线模拟精调方案
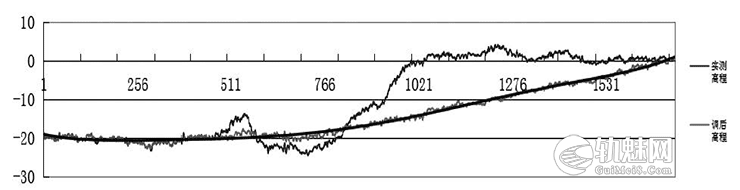
图3 右线模拟精调方案
由于道床板DK18+236.35处高程差的存在(但不至于揭板),所以通过该段数据生成Excel高程对比图,观察到轨面高程变化下降很快,而且变化数据较大,下降曲线不圆顺,调整范围已经超过扣件调整范围,故不能采用拟合竖曲线方式调整。综合考虑之后选择改变原有设计坡度,通过扣件调整来完成。通过试算结果与各调整扣件量对比之后,选择前、后坡长等长,长度为480m,两边各顺延9mm施工差,中间不设置竖曲线方式调整。根据精测数据在轨道精调软件中计算模拟调整,调整之后生成波形图,通过第一次模拟精调试算后,模拟效果即可体现,如图2和图3所示。现场精调完成之后,再次复测精调区段,轨道的高低长短波、水平等达到了《高速铁路轨道工程施工质量验收标准》(TB10754—2018)要求,并且最终的动检车动态检测也符合要求,车速达到275km/h(设计时速200km/h),其轨道质量指数TQI值等也符合《高速铁路无砟轨道线路维修规则》(铁运〔2012〕83号)要求。说明该方法可以解决局部地段调整量过大的问题。
5 结语
在施工测量中遇到断高时,首先分析断高产生的原因,查找断高产生的范围,这样才能正确划分调整线路纵坡的段落。通过研究兰新客专两相邻施工标段扣件系统和静态铺设轨道相关精度,制定精调方案,对于因水准点下沉等特殊原因引起的施工高程偏差大这类问题的解决,给出了调整原有设计坡度的轨道调整方案,实践验证了该方法可行,达到了高铁轨道静态验收标准。
文章来源:
作者:张文学1,颜彬2,王小刚3󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
单位:1. 湖南省高铁运行安全保障工程技术研究中心,湖南株洲412006;2. 中国铁路广州局集团长沙高铁工务段,湖南长沙410000;3. 中铁西安勘察设计研究院有限责任公司,陕西西安710054󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄩󠄡󠄞󠄡󠄦󠄧󠄞󠄧󠄩󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
期刊:交通世界 2021


