道不平顺的测定方法对于取得结果的真实性有很大的影响。目前世界各国用来测量高低﹑轨向不平顺的方法可归纳为弦测法和惯性基准法两大类。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
弦测法包括:两点差分法、三点中弦法(又称正矢法)、三点偏弦法﹑多点弦测法。苏联轨检车采用两点差分法﹐法国国铁轨检车采用多点弦测法﹐国外许多轨检车采用三点中弦法或三点偏弦法。国内外的轻型轨检小车大都采用三点中弦法。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
惯性基准法包括:惯性位移法(又称振动质量法)﹑轴箱加速度积分法﹑轴箱加速度快速傅里叶变换法﹑质量弹簧系统加速度积分与位移相加法﹐前三种方法由于可测波长范围较窄等缺点,仅个别国家、少数研究机构曾采用或试用。只有加速度积分与位移相加法被许多国家的现代轨检车普遍采用,成为实用化的“惯性基准法”。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
下面简要介绍各国使用最广的“三点弦测法”和“惯性基准法”。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
弦测法
“弦测法”是利用车体与三个轮对,在车辆上建立测量“基准线”进行轨道高低和轨向测量。将检测车前后两轮与轨道接触点的连线作为测量的基准线,中间轮与轨道接触点偏离基准线的大小作为高低不平顺的测量结果,如图1所示。

图1 弦测法(高低)原理示意
弦测法以测量位移为基础,由于其测量结果不受速度等因素影响,与现场测量方法比较接近,且与现场真实值相一致的特点,一直沿用至今,具有一定的生命力。
惯性基准法
惯性基准法建立测量基准线,是由质量弹簧系统中质量块的运动轨迹给出的。以轨道高低为例,惯性基准原理如图2所示,图中质量块M为车体,A为高低加速度计,K、C分别表示其弹簧和阻尼。惯性基准就是当轴箱的上下运动很快时(即底座振动频率大大高于系统的自频率),质量块M不能追随而保持静止的位置。这个静止位置即为质量—弹簧系统的“惯性基准”,或称“惯性零位”。
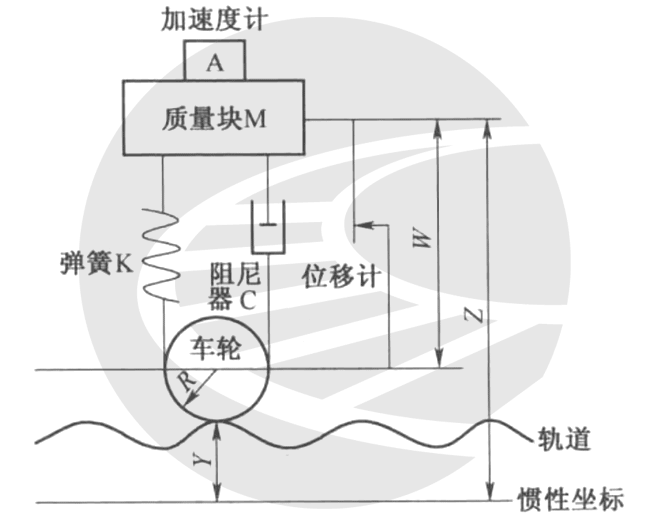
图2 惯性基准法原理示意
车轮轴箱的垂向运动(即轨道高低不平顺y)等于质量——弹簧系统中质量块M相对于惯性坐标的位移Z,与质量块M和轴箱间相对位移W、车轮半径R之差:
y(x)=Z-W-R
设a为质量块M在某位置时的垂直加速度,对垂直加速度a两次积分就能得到质量块M相对于惯性坐标的位移Z,即:󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
$$Z=\iint adtdt$$󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
质量块M与轴箱间的相对位移W由位移传感器测得,所以轨道高低不平顺y的表达式为:󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
$$y(x)=Z-W-R=\iint adtdt-W-R(R为常数)$$󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
该方法的特点是质量块M上的加速度传感器A主要反映频率较低的长波,位移传感器主要反映频率较高的短波,两者之和即为整个需测波长范围的轨道不平顺。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
水平基准的建立不同于高低和方向,是通过敏感重力得到当地水平。因此,水平测量无车速限制,即使是车辆静止时亦可进行测量。重力本身与行车速度无关,但重力测量要受到列车行进中复杂运动的影响。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
在惯性基准法建立高低、方向、水平测量基准的过程中,利用加速度计敏感重力或车辆加速度,要受到列车运动产生的干扰。消除干扰的方法是引入摇头及侧滚角速度,利用惯性器件中最基本的部件——速率陀螺来完成修正。除此之外,摇头角速度还被用来测量曲线的曲率及曲线半径。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
从上述惯性基准法的数学模型可以看出,在某一可测波长范围内其传递函数恒为1。由于惯性基准法是建立在物体运动加速度测量上,加速度与速度的平方成比例,导致低速下产生的加速度信号非常微弱。惯性基准法测量轨道不平顺时需要对传感器信号低对应的时间间隔越长,低速下进行长时间的积分容易产生饱和,引起的误差较大。因此,惯性基准法适于高速测量高低、轨向、水平等几何数据。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
弦测法,惯性基准法传递函数对比如图3所示。󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
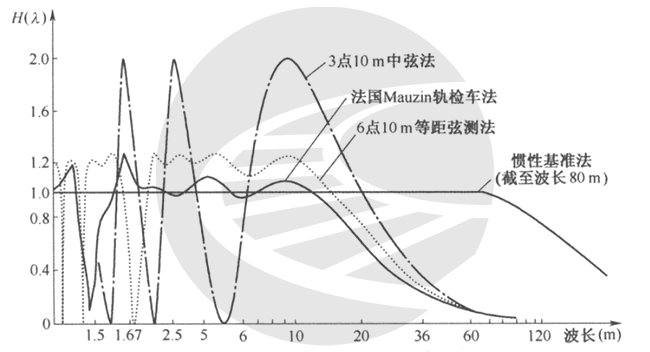
图3 弦测法、惯性基准法传递函数的比较示意
引用文献:
谢文军《GJ-6型轨检车检测系统原理及应用》2017󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮



可以下载吗。