
一、目的与要求
1.目的:准确掌握线路状态和钢轨空间状态量化数据,快速、全面的获得线路检查资料,为轨道、道岔精调提供可靠依据,以满足线路高可靠性、高稳定性、高平顺性的要求。
2.要求
⑴作业人员经过专业培训考试并合格,能够准确掌握精确测量要领、熟练操作标准,责任心强。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
⑵机具设备应由专业小组或专人负责保管、检修、维护及使用。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
⑶机具性能及各部件符合技术要求,运行状态良好。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
二、适用范围
适用于新建高速铁路提前介入期间轨道线路绝对测量。
三、引用资料
《高速铁路工程测量规范》(TB 10601-2009)、《高速铁路有砟轨道线路维修规则(试行)》、《高速铁路无砟轨道线路维修规则(试行)》。
四、作业组织
1.测量人员:一般不少于3人,小车2人(其中一人兼顾作业负责人)、拆装棱镜1人;
2.防护设置:本线和邻线均无工程车运行时,可不设防护员;本线无工程车运行,邻线有车时,设现场防护员1名,及时与临时调度所和车站人员联系,掌握邻线工程车运行情况;本线及邻线均有工程车运行时,前后增设远端防护员和驻站防护员。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
3.作业工具:GEDO Vorsys小车2台、Trimble S8全站仪、专用棱镜(棱镜杆)、TSC3控制器(内置电台模块)、供电模块等。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
五、准备工作
- 线路设计参数导入
GEDO Office软件线路设计参数导入参照单车绝对测量(天宝)作业指南,将编辑完成的GEDO Office软件添加至TSC3控制器中。
2.班前教育与分工
作业负责人组织作业人员进行班前教育,明确作业地点、作业内容、作业时间、人员分工、作业标准等。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
3.工(机)具准备
出发前要清点所有带上线路的工(机)具规格数量,检查工(机)具的状态,禁止带病上道作业。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
六、现场作业
1.建任务文件。打开TSC3 GEDO Vorsys软件,选择文件→项目设置→任务文件,输入任务名名称,点击确认。
2.选择线路参数。文件→项目设置→线路参数。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
3.选择轨检小车文件(第一步创建文件)。文件→项目设置→轨检小车。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
4.导入CPⅢ控制点。文件→项目设置→控制点。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
5.定义工作弦线。定义弦并选择作业方向(全站仪小车推行弦首点对控制点进行测量并存储,在将小车推行弦末控制点点进行测量并存储,弦长一般设置为150-200m)。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
6.连接全站仪。将全站仪对准小车棱镜,点击连接全站仪,连接成功后棱镜小车界面系统激活,并对弦首点进行测量存储。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
全站仪小车瞄准工作弦起点控制点,整平并测量。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮

全站仪小车移至工作弦终点,瞄准控制点棱镜,固定整平测量。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮

全站仪瞄准棱镜小车,测量线路首点(通常弦起始点为线路测量首点)。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
7.轨道测量。点击棱镜小车测量,由远及近并存储记录(一般5m进行一个点进行测量)。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮

8.数据导出。文件→数据导出(导出文件存在于手柄猫内存卡之中,可将其导出至电脑)。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
七、数据处理分析
1.打开GEDO Tamp软件,在文件菜单下新建一个工作项目,选择正确的存储路径,输入正确的项目名称。
2.设置属性。窗口→设置,设置好当前作业项目属性。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
3.导入测量数据。文件→导入→测量数据,选择正确的数据格式,等待数据显示后再对数据进行优化,一般对最大、最小值及折点等情况进行处理。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
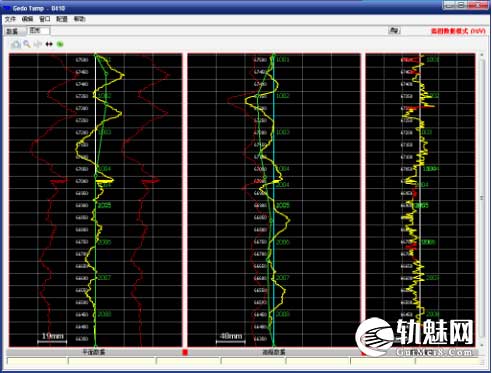
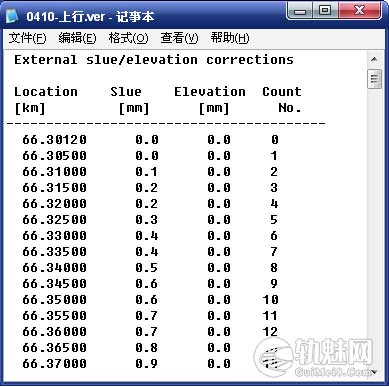
4.数据导出。文件→导出→捣固数据,选择步长值。
八、注意事项
1.观测方法采用由远及近的方式,尽量避免利用往返测量方式,否则会造成往返测观测数据不一致性。
2.由于全站仪及观测环境的客观因素,定义弦长范围为150-200m之间,以保证测量数据的精度。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
3.建议小车上棱镜安放应保持,棱镜面朝向全站仪,避免左右、上下的偏转,否则会照成测量数据的错误性。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
4.由于TSC3控制器CPU处理速度和GEDO Vorsys软件本身的局限性,在点触屏幕菜单时,应保持稳妥,等待上个命令执行完毕后再发送下个命令,否则容易造成死机现象。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
5.如果TSC3手柄猫死机,可按住电源键5秒重新启动,但重新启动后需检查手柄猫和全站仪之间的蓝牙连接设置。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮
6.Vorsys CE软件安装前需要安装Microsoft NET 2.0 Framework框架结构;安装Trimble TSM软件,并输入有效的TSM注册码,才能正常使用。󠄐󠄹󠅀󠄪󠄡󠄨󠄞󠄡󠄡󠄩󠄞󠄡󠄢󠄡󠄞󠄤󠄬󠅒󠅢󠄟󠄮󠄐󠅅󠄹󠄴󠄪󠄾󠅟󠅤󠄐󠄼󠅟󠅗󠅙󠅞󠄬󠅒󠅢󠄟󠄮󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹󠄬󠅒󠅢󠄟󠄮


